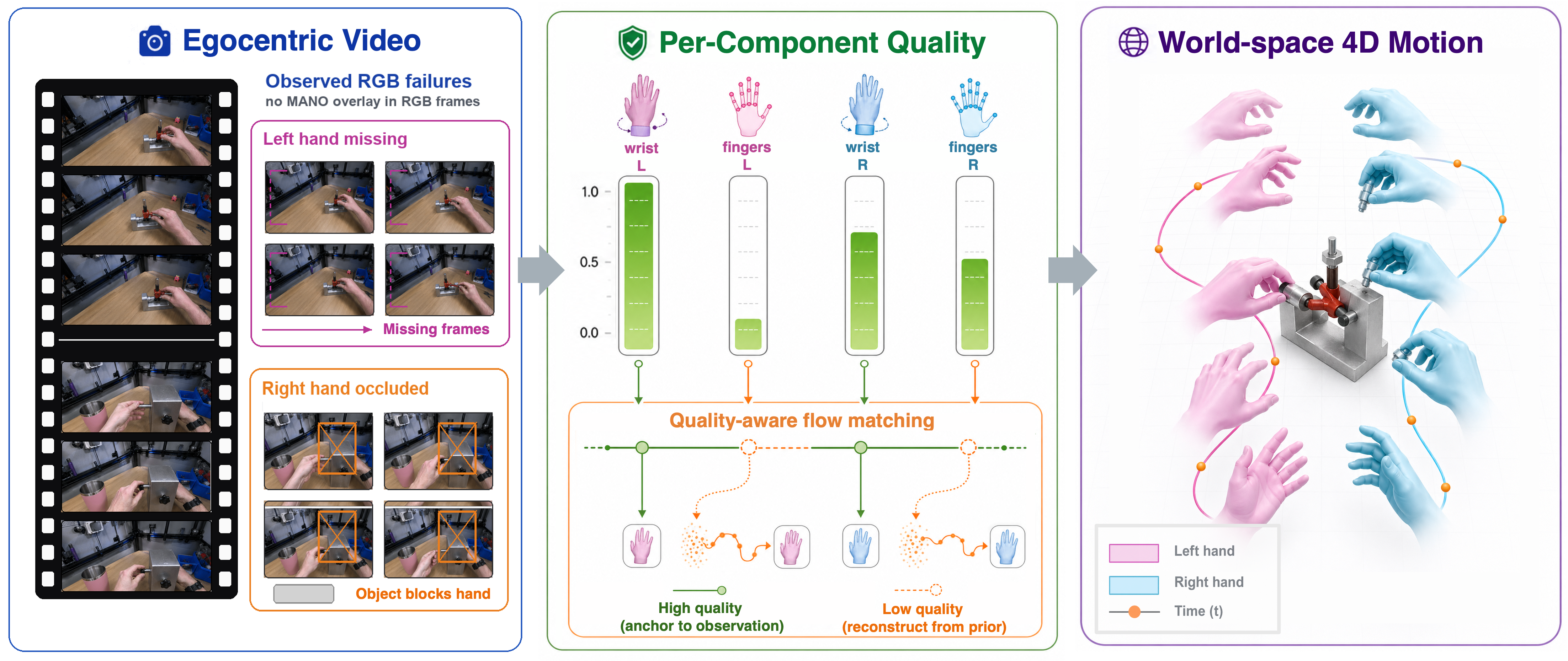
Recovering world space 4D motion of two interacting hands from egocentric video is a fundamental capability for supervising robot policy learning, where wrist trajectories track the end-effector and finger articulations specify the grasp pose. Two major challenges arise in this setting: hands frequently leave the camera view for extended periods due to head motion, and persistent hand-object interactions cause severe occlusions of one or both hands. Existing methods uniformly condition on noisy hand motion observations without accounting for their per-frame reliability, leading to substantial performance degradation.
Our key insight is that accurate world space hand motion estimation is tightly coupled with the quality of per-frame hand observations. To this end, we decompose the quality of hand motion observations extracted from an off-the-shelf hand pose estimator into four channels: wrist global translation and finger articulations for both hands. We propose StableHand, a quality-aware flow-matching framework conditioned on these four-channel quality signals, which are predicted by a learned quality network. We naturally incorporate the quality signals into the flow-matching process through a per-channel forward schedule, a quality-adjusted velocity target, AdaLN modulation of the DiT denoiser, and a quality-aware ODE initialization. This unified generative process preserves high-quality observations while reconstructing unreliable ones using a learned bimanual motion prior.
Experiments on HOT3D and ARCTIC, two egocentric benchmarks featuring long missing-hand spans and persistent hand-object occlusions, show that StableHand achieves state-of-the-art performance across all reported metrics, reducing W-MPJPE by 20–25% compared to the strongest baseline, with the largest gains on heavily occluded ARCTIC sequences.
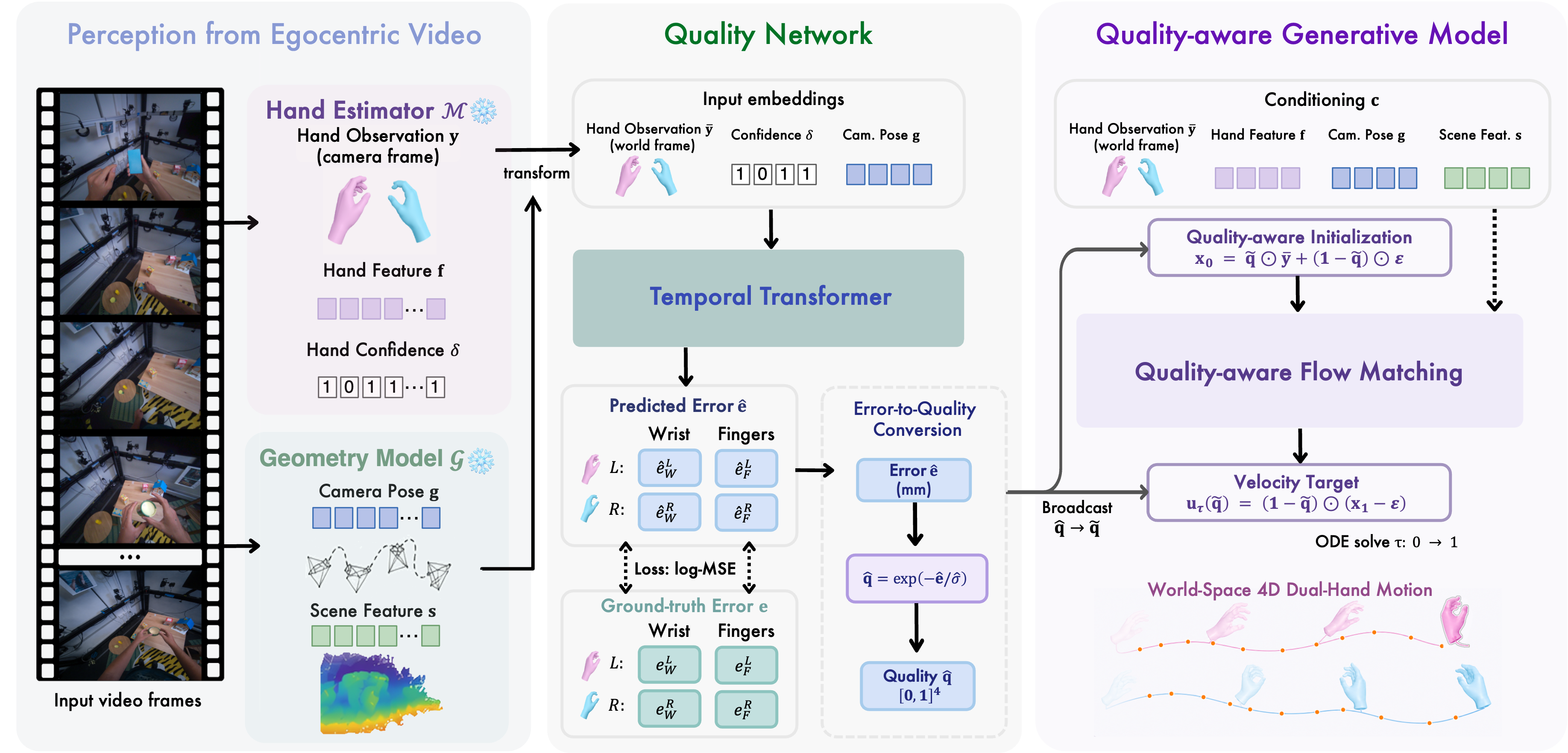
From an egocentric video, frozen off-the-shelf modules produce per-hand MANO observations together with camera and scene context. StableHand consists of two learned modules:
World-space dual-hand trajectories on HOT3D.
StableHand re-anchors when observations resume, while the camera-view WiLoR baseline drifts across long missing-hand spans.
World-space dual-hand trajectories on ARCTIC.
Under persistent bimanual occlusion, StableHand preserves both hands' trajectories while baselines collapse the occluded hand to a generic prior.
@article{zeng2026stablehand,
title = {StableHand: Quality-Aware Flow Matching for World-Space Dual-Hand Motion Estimation from Egocentric Video},
author = {Zeng, Huajian and Yao, Chaohua and Zhang, Yuantai and Yang, Jiaqi and Potamias, Rolandos Alexandros and Zuo, Xingxing},
journal = {arXiv preprint arXiv:2605.18553},
year = {2026},
}